
ガントリーロボットはコラムフレーム、X軸コンポーネント、Y軸コンポーネント、Z軸コンポーネント、治具、コントロールボックスで構成されます。
直交するX、Y、Z三次元座標系に基づいて、ワークの位置を調整したり、ワークの軌道移動を実現したりする全自動の産業用装置です。その制御コアは産業用コントローラーを通じて実装されます。
コントローラは、さまざまな入力信号を分析および処理し、論理的判断を行って、各出力コンポーネントに実行命令を発行し、X、Y、Z 軸間の関節動作を完了し、完全な自動動作プロセスを実現します。
製品の組み立てや搬送、搬送システム、無人作業現場などで使用されています。一時保管や物流などの重要な周辺機器として、上位機器と柔軟に組み合わせて使いやすくご利用いただけます。アプリケーション:製品の最終組立、サブ組立、加工、テスト、デバッグ、輸送などに関わる産業。
製品の特徴は、顧客がさまざまなタイプのマテリアルハンドリングにおける低効率または高いハンドリングリスクの問題を解決し、便利かつ迅速にハンドリングリスクを軽減し、時間と労力を節約し、労力を節約し、さらには労働力を代替できるように支援することです。
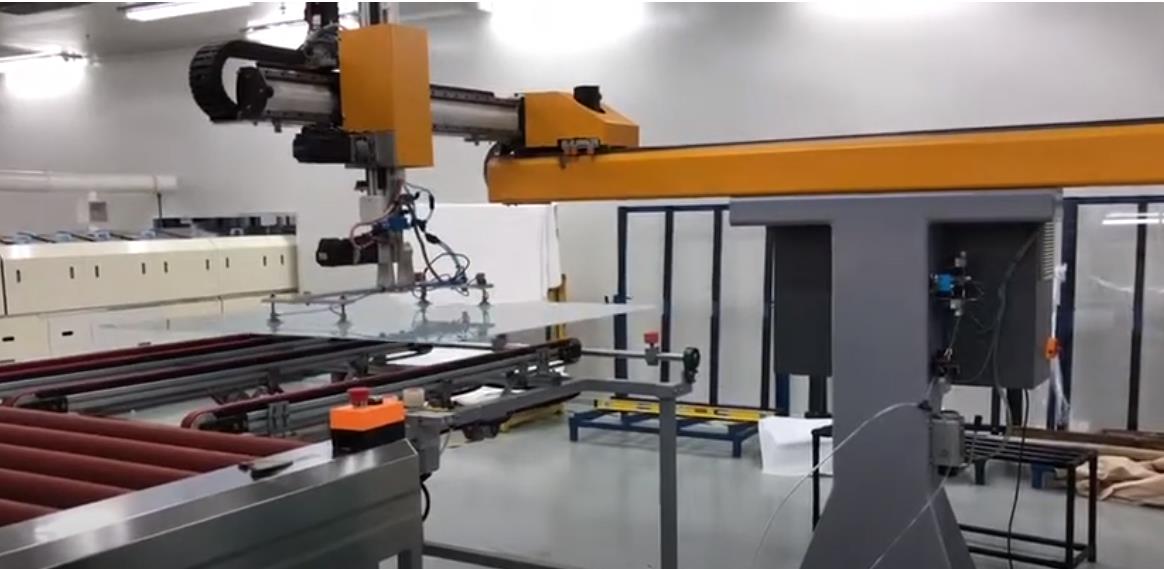
 このガラス用ガントリートラスマニピュレータハンドリング装置は、柱と、柱に設置される横梁とを備える。横梁はスライドレールで設置されています。スライドレールは横スライド装置を備えています。横スライド装置には、縦スライド装置と空気圧吸盤装置が装備されています。実現可能 搬送機構は3次元空間の定点を移動し、吸盤を通してガラスを吸着し、まずX軸上で横方向に移動し、次に90度反転して指定位置まで移動し、その後上方向に移動しますY 軸上に下に移動します。セット位置に到達したら、ガラスを放し、ガラス棚に置きます。装置全体の構造安定性が非常に高く、操作性が大幅に向上します。効率。
このガラス用ガントリートラスマニピュレータハンドリング装置は、柱と、柱に設置される横梁とを備える。横梁はスライドレールで設置されています。スライドレールは横スライド装置を備えています。横スライド装置には、縦スライド装置と空気圧吸盤装置が装備されています。実現可能 搬送機構は3次元空間の定点を移動し、吸盤を通してガラスを吸着し、まずX軸上で横方向に移動し、次に90度反転して指定位置まで移動し、その後上方向に移動しますY 軸上に下に移動します。セット位置に到達したら、ガラスを放し、ガラス棚に置きます。装置全体の構造安定性が非常に高く、操作性が大幅に向上します。効率。

投稿日時: 2024 年 3 月 18 日



