
製品


コラボレーションロボットアームマニピュレータ
カンチレバーサスペンションの特徴
1.アルミニウム合金タイプのアームまたはスチールカンチレバーを選択します。
2.モジュラーアセンブリ、交換可能なカンチレバーの長さ;
3.回転角度0-360°;
4.取り付けが簡単で速い。


カンチレバーサスペンションの利点
1. カンチレバーは、現代の生産のための新世代の軽量吊り上げ装置です。リング電気ひょうたんチェーンは信頼性が高く、短距離、頻繁な使用、集中的な吊り上げ作業に特に適しています。高効率、省エネ、トラブルの軽減、狭い面積、簡単な操作とメンテナンスの利点があります。
2. カンチレバーはより柔軟で幅広い適応性があり、効率的で自動化された生産ラインに必要な個別の緊急吊り上げ装置であり、生産ラインのスムーズな流れを確保できます。
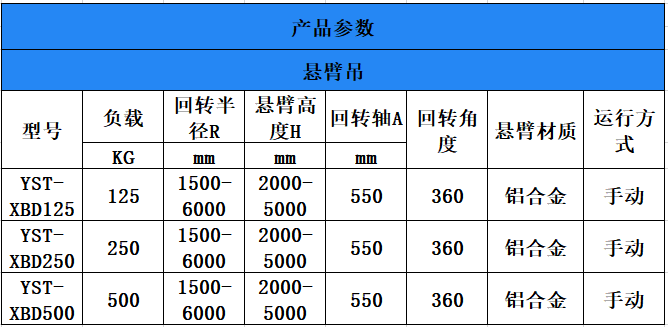
| モデル | 負荷 | R/mm | ふーむ | A/mm | 回転 | 材料 | 働く |
| YST-XBD125 | 125 | 1500-6000 | 2000-5000 | 550 | 360 | アルミニウム合金 | 手 |
| YST-XBD250 | 250 | 1500-6000 | 2000-5000 | 550 | 360 | アルミニウム合金 | 手 |
| YST-XBD500 | 500 | 1500-6000 | 2000-5000 | 550 | 360 | アルミニウム合金 | 手 |
製品説明
協働ロボットは、共有の共同ワークスペースで人間の作業者と一緒に安全に作業できるように構築されたロボット オートメーションの一種です。ほとんどのアプリケーションでは、協働ロボットが反復的で単純な作業を担当し、人間の作業者がより複雑で思考集約的なタスクを実行します。協働ロボットの精度、稼働時間、再現性は、人間の作業者の知性と問題解決スキルを補完するように設計されています。
協働ロボットの設計は、対応する産業用ロボットとは大きく異なります。丸みを帯びたエッジ、力の制限、軽量を特徴とする協働ロボットは、何よりも安全性を重視して設計されています。ほとんどの協働ロボットには、人間の作業者との衝突を回避するための一連のセンサーと、何らかの形で予期せぬ接触が発生した場合にシャットダウンするための安全プロトコルが装備されています。
製品の特徴
1.アルミニウム合金タイプのアームまたはスチールカンチレバーを選択します。
2.モジュラーアセンブリ、交換可能なカンチレバーの長さ;
3.回転角度0-360°;
4.取り付けが簡単で速い。









