
製品


電動ジブクレーン ロボットアーム マニピュレータ
簡単な説明:
電動ジブクレーンロボットアームマニピュレータはカンチレバーリフティングクレーンとも呼ばれ、構造がシンプルで安全で信頼性が高く、インターバルが集中する輸送機会に適しています。他の従来の吊り上げ装置よりも多くの利点があります。カンチレバークレーンは電動エレベーターとハンドプルを使用した吊り上げ装置です。エレベーターは、便利で人気のある小型昇降装置です。

電動ジブクレーンロボットアームマニピュレータは、コラム、スイングアーム、回転駆動装置、昇降装置で構成された軽作業強度のパワーマニピュレータです。軽量、大きなスパン、移動、左右の直線移動用のカンチレバー上の昇降装置を備え、重い物を運ぶ。
電動ジブクレーン ロボットアームマニピュレータは、材料の持ち上げを補助し、オペレータがスムーズ、迅速かつ正確なハンドリングとスタッキングを行うのを支援し、生産効率を向上させ、人件費を削減します。

私たちについて

当社はカスタマイズされた自動化機器の専門メーカーです。当社の製品には、デパレタイザー、ピックアンドプレイス梱包機、パレタイザー、ロボット統合アプリケーション、ロードおよびアンロードマニピュレーター、カートン成形、カートンシーリング、パレットディスペンサー、包装機、およびバックエンド包装生産ライン向けのその他の自動化ソリューションが含まれます。
当社の工場面積は約3,500平方メートルです。コア技術チームは、機械設計エンジニア 2 名を含む、機械オートメーション分野で平均 5 ~ 10 年の経験を持っています。プログラミングエンジニア 1 名、組立作業者 8 名、アフターデバッグ担当者 4 名、その他 10 名
当社の原則は「顧客第一、品質第一、評判第一」であり、常にお客様の「生産能力の向上、コストの削減、品質の向上」を支援し、機械自動化業界のトップサプライヤーになるよう努めています。
カンチレバーサスペンションの特徴
1.アルミニウム合金タイプのアームまたはスチールカンチレバーを選択します。
2.モジュラーアセンブリ、交換可能なカンチレバーの長さ;
3.回転角度0-360°;
4.取り付けが簡単で速い。


カンチレバーサスペンションの利点
1. カンチレバーは、現代の生産のための新世代の軽量吊り上げ装置です。リング電気ひょうたんチェーンは信頼性が高く、短距離、頻繁な使用、集中的な吊り上げ作業に特に適しています。高効率、省エネ、トラブルの軽減、狭い面積、簡単な操作とメンテナンスの利点があります。
2. カンチレバーはより柔軟で幅広い適応性があり、効率的で自動化された生産ラインに必要な個別の緊急吊り上げ装置であり、生産ラインのスムーズな流れを確保できます。
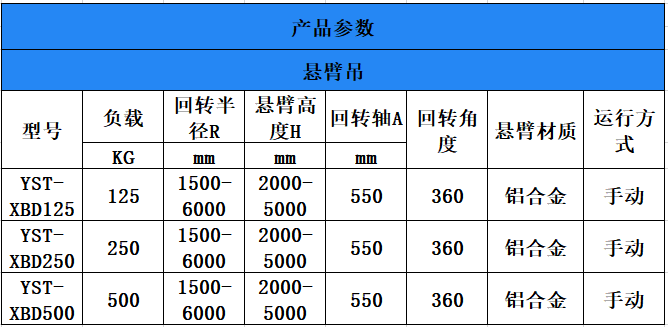
| モデル | 負荷 | R/mm | ふーむ | A/mm | 回転 | 材料 | 働く |
| YST-XBD125 | 125 | 1500-6000 | 2000-5000 | 550 | 360 | アルミニウム合金 | 手 |
| YST-XBD250 | 250 | 1500-6000 | 2000-5000 | 550 | 360 | アルミニウム合金 | 手 |
| YST-XBD500 | 500 | 1500-6000 | 2000-5000 | 550 | 360 | アルミニウム合金 | 手 |
製品説明
協働ロボットは、共有の共同ワークスペースで人間の作業者と一緒に安全に作業できるように構築されたロボット自動化の一種です。ほとんどのアプリケーションでは、協働ロボットが反復的で単純な作業を担当し、人間の作業者がより複雑で思考集約的なタスクを実行します。協働ロボットの精度、稼働時間、再現性は、人間の作業者の知性と問題解決スキルを補完するように設計されています。
協働ロボットの設計は、対応する産業用ロボットとは大きく異なります。丸みを帯びたエッジ、力の制限、軽量を特徴とする協働ロボットは、何よりも安全性を重視して設計されています。ほとんどの協働ロボットには、人間の作業者との衝突を回避するための一連のセンサーと、何らかの形で予期せぬ接触が発生した場合にシャットダウンするための安全プロトコルが装備されています。
製品の特徴
1.アルミニウム合金タイプのアームまたはスチールカンチレバーを選択します。
2.モジュラーアセンブリ、交換可能なカンチレバーの長さ;
3.回転角度0-360°;
4.取り付けが簡単で速い。









